通信电缆 网络设备 无线通信 云计算|大数据 显示设备 存储设备 网络辅助设备 信号传输处理 多媒体设备 广播系统 智慧城市管理系统 其它智慧基建产品

上海苏嵩自动化设备有限公司

上海苏嵩自动化设备有限公司
西门子PLCs7-300开关量模块
PLC产品包括LOGO,S7-200(CN),S7-1200,S7-1500, S7-300,S7-400,TDC,工业网络,HMI人机界面,工业软件等。 西门子S7系列PLC体积小、速度快、标准化,具有网络通信能力,功能更强,可靠性更高。西门子S7300plc代理商,西门子代理商,西门子总代理,,西门子电机总代理,
6ES7 321-1FH00-0AA0 6ES7 321-1FH00-0AA0
===================================================================================
西门子PLCs7-300开关量模块 西门子PLCs7-300开关量模块
某控制系统有3台电机,当按下起动按钮SB1时,润滑电机起动;运行10s后,主电机起动;运行20s后,冷却泵电机起动。当按下停止按钮SB2时,主电机立即停止;主电机停5s后,冷却泵电机停;冷却泵电机停5s后,润滑电机停。当任一电机过载时,3台电机全停。
2.I/O分配
输入信号:起动SB1-X0;
停止SB2-X1;
*台电机的过载保护-X2(接常闭触点);
第二台电机的过载保护-X3(接常闭触点);
第三台电机的过载保护-X4(接常闭触点)。
输出信号:润滑电机-Y0;
主电机-Y1;
冷却泵电机-Y2。
3.程序设计
该控制系统是典型的顺序起动,逆序停止控制。其程序如下图所示。
1.控制要求
2.I/O分配 正转起动按钮SB1—X0; 停止按纽SB3—X2; 输出信号: 反转交流接触器KM2—Y1。 若PLC的输入点较富裕,则热继电器的常闭触点可占用PLC的输入点,见下图(a);若输入点较紧张,则热继电器的信号可不输入PLC,而直接接在PLC外部的控制电路中,见下图(b)。

(a)热继电器触点接入PLC中(b)热继电器触点不接入PLC中
图 电动机正反转控制I/O接线图
电动机正反转控制程序如下图所示。

图 正反转程序
PLC控制系统是由继电器控制系统和计算机控制系统发展而来的,与传统的继电器控制系统相比,主要不同表现在以下几个方面。
(1)继电器控制系统采用许多硬器件、硬触点和“硬”接线连接,组成逻辑电路实现逻辑控制要求,而且易磨损、寿命短。而PLC控制系统内部大多采用“软”继电器、 “软”接点和“软”接线连接,其控制逻辑由存储在内存中的程序实现,且无磨损现象,寿命长。
(2)继电器控制系统体积大、连线多,PLC控制系统结构紧凑、体积小、连线少。
(3)改变继电器控制系统功能需拆线、接线乃至更换元器件,比较麻烦。而改变PLC控制功能,一般仅修改程序即可,极其方便。
(4)继电器控制系统中硬继电器的触点数量有限,用于控制用的继电器触点数一般只有4~8对,而PLC每只软继电器供编程用的触点数有无限对,使PLC控制系统有很好的灵活性和扩展性。
(5)在继电器控制系统中,为了达到某种控制目的,要求安全可靠,节约触点用量,因此,设置了许多制约关系的连锁环节。在PLC中,由于采用扫描工作方式,不存在几个并列支路同时动作的因素,因此,设计过程大为简化,可靠性增强。
(6) PLC控制系统具有自检功能,能查出自身的故障,随时显示给操作人员,并能动态地监视控制程序的执行情况,为现场调试和维护提供了方便。
(7)定时控制,继电器控制逻辑利用时间继电器进行时间控制。一般来说,时间继电器存在定时精确度不高、定时范围窄、易受环境湿度和温度变化的影响、时间调整困难等问题。PLC使用半导体集成电路做定时器,时基脉冲由晶体振荡器产生,精度相当高,且定时时间不受环境的影响,定时范围一般从0.001s到若干天或更长,用户可根据需要在程序中设置定时值,然后由软件来控制定时时间。
从以上几个方面的比较可知,PLC在性能上优于继电器,控制逻辑优异,特别是具有可靠性高,设计施工周期短,调试修改方便的特点,而且体积小、功耗低、使用维护方便。但在很小的系统中使用时,价格要高于继电器控制系统。
1多功能测量表SENTRON PAC3200简介
SENTRON PAC3200电能监视设备可精确提供系统特性,包括电压和电流大值、小值和平均值,功率值、频率、功率因数、对称性、逻辑计算、负载趋势、谐波和总谐波失真等。SENTRON PAC3200可检测 50 多个基本数值,具有 10个电能计数器,可用于全面负载检测。它们的测量准确度满足电能计数器标准所规定的较高要求。PAC3200带有MODBUS RTU-RS485接口、PROFIBUS-DP接口和MODBUS TCP 接口,可以很方便将PAC3200的数据上传到PLC中进行处理,也可以上传到HMI中进行数据分析、处理及归档。对于西门子系统可以轻松地将PAC3200集成到上位自动化系统中,例如,集成到西门子 SIMATIC PCS 7 powerrate 和SIMATIC WinCC powerrate 软件包中。
2 PAC3200通信接口对比
PAC3200可以通过MODBUS RTU RS485接口、MODBUS TCP 以太网接口以及现场总线PROFIBUS-DP接口与PLC和HMI通信。下面分别以连接S7-300 PLC为例,在通信性能、连接的个数、编程方面进行对比:
1) 通信性能:PROFIBUS-DP使用令牌方式由主站依次访问从站,是实时现场总线,通信响应快,通信的响应时间应考虑PAC3200数据的刷新时间(自身刷新时间可能较PROFIBUS-DP刷新时间慢);如果选择以太网MODBUS TCP 通信,由于不是实时网络,通信性能次之,通信的响应时间也应考虑PAC3200数据的刷新时间(自身刷新时间可能较以太网刷新时间慢);使用RS485 MODBUS RTU通信,由于基于串口,通信性能不能与以太网与PROFIBUS-DP相比较。
2) 连接个数:使用PROFIBUS-DP,基于主站的性能,多可以连接126个站点;以太网MODBUS TCP 通信,基于CP的连接个数,通常16个;使用RS485 MODBUS RTU,可以连接一个网段,典型值31个站点。
3) 编程:使用PROFIBUS-DP,不需要编写通信程序;使用以太网MODBUS TCP 通信,需要编写发送接收通信程序;使用RS485 MODBUS RTU通信,需要编写从站轮询程序,比较麻烦,如果没有购买MODBUS RTU的驱动,还需要编写通信程序。
4) 价格:PROFIBUS-DP与RS485 MODBUS RTU通信需要购买选件网卡,而PAC3200本身集成以太网接口,支持MODBUS TCP 通信。
下面将介绍PAC3200的MODBUS TCP 通信。
3 MODBUS TCP 通信报文
MODBUS TCP 使MODBUS RTU协议运行于以太网,MODBUS TCP使用TCP/IP和以太网在站点间传送MODBUS报文,MODBUS TCP结合了以太网物理网络和网络标准TCP/IP以及以MODBUS作为应用协议标准的数据表示方法。MODBUS TCP通信报文被封装于以太网TCP/IP数据包中。与传统的串口方式,MODBUS TCP插入一个标准的MODBUS报文到TCP报文中,不再带有数据校验和地址,如图1所示:
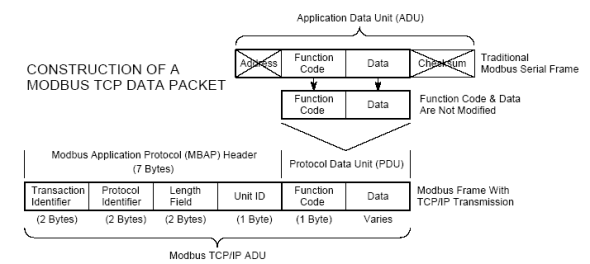
图1 MODBUS TCP报文
由于使用以太网TCP/IP数据链路层的校验机制而保证了数据的完整性,MODBUS TCP 报文中不再带有数据校验”CHECKSUM”,原有报文中的“ADDRESS”也被“UNIT ID”替代而加在MODBUS应用协议报文头中。
MODBUS TCP服务器使用502端口与客户端进行通信。
S7-300 与PAC3200 之间进行MODBUS TCP 通信时,MODBUS应为协议的报文头赋值如下:
byte 0: transaction identifier (高字节) – 为0
byte 1:transaction identifier(低字节) - 为0
byte 2:protocol identifier(高字节) = 0
byte 3:protocol identifier (低字节) = 0
byte 4:length field (高字节) = 0 (因为所有的报文小于256)
byte 5:length field (低字节) = 后面跟随的字节数
byte 6:unit identifier -原从站地址,这里为0
byte 7:MODBUS 功能码,通过功能码发送通信命令
byte 8 ~:后续的字节数与功能码相关
4 PAC3200支持的MODBUS TCP 功能码
在MODBUS TCP 的报文中,通过使用功能码请求通信伙伴的数据,如对内部寄存器的读写操作、读输入寄存器、写输出寄存器等。不同的操作使用不同的功能码,如FC1、2、3、4、5、6、7、15、16等,PAC3200支持FC2、FC3、FC4、FC6、FC16,在下面将介绍PAC3200这些功能码的报文格式:
FC2 读输入的位信号:
请求:
Byte 0: 功能码,2
Byte 1-2: 开始的位地址
Byte 3-4:位的个数 (1-2000)
响应:
Byte 0: 返回的功能码 2
Byte 1: 返回的字节个数 (B=(位的个数+7)/8)
Byte 2-(B+1): 位信号的值 (低有效位是*个位信号)
FC3 读多个寄存器信号:
请求:
Byte 0: 功能码,3
Byte 1-2: 寄存器开始地址
Byte 3-4: 寄存器的个数 (1-125)
响应:
Byte 0: 返回的功能码 3
Byte 1: 返回的字节个数 (B=2倍寄存器数)
Byte 2-(B+1): 寄存器的值
FC4 读输入寄存器信号:
请求:
Byte 0: 功能码,4
Byte 1-2: 输入寄存器开始地址
Byte 3-4: 输入寄存器的个数 (1-125)
响应:
Byte 0: 返回的功能码 4
Byte 1: 返回的字节个数 (B=2倍输入寄存器数)
Byte 2-(B+1): 输入寄存器的值
FC6 写单个寄存器信号:
请求:
Byte 0: 功能码,6
Byte 1-2: 寄存器地址
Byte 3-4: 寄存器的值
响应:
Byte 0: 返回的功能码 6
Byte 1-2: 寄存器地址
Byte 3-4: 寄存器的值
FC16 写多个寄存器信号:
请求:
Byte 0: 功能码,10(HEX)
Byte 1-2: 寄存器开始地址
Byte 3-4: 寄存器的个数 (1-100)
Byte 5:字节的个数 (B=2倍输入寄存器数)
Byte 6-(B+5) 预置的寄存器值
响应:
Byte 0: 返回的功能码 10(HEX)
Byte 1-2: 寄存器开始地址
Byte 3-4: 寄存器个数
您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN


智慧城市网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码











