通信电缆 网络设备 无线通信 云计算|大数据 显示设备 存储设备 网络辅助设备 信号传输处理 多媒体设备 广播系统 智慧城市管理系统 其它智慧基建产品

上海地友自动化设备有限公司

上海地友自动化设备有限公司
西门子数控810D 6FC5210-0DF00-1AA3 SINUMERIK 810D/840D 电子控制设备 PCU20:SPC 500MHz/32MB DC 24V 带 HMI 软件
西门子数控810D 6FC5210-0DF00-1AA3 SINUMERIK 810D/840D 电子控制设备 PCU20:SPC
EM 253 参考点偏移量地址:
EM253 的参考点偏移量 RP_OFFSET 地址可在数据块中查看到, 如下图 6 所示 VD1088 :
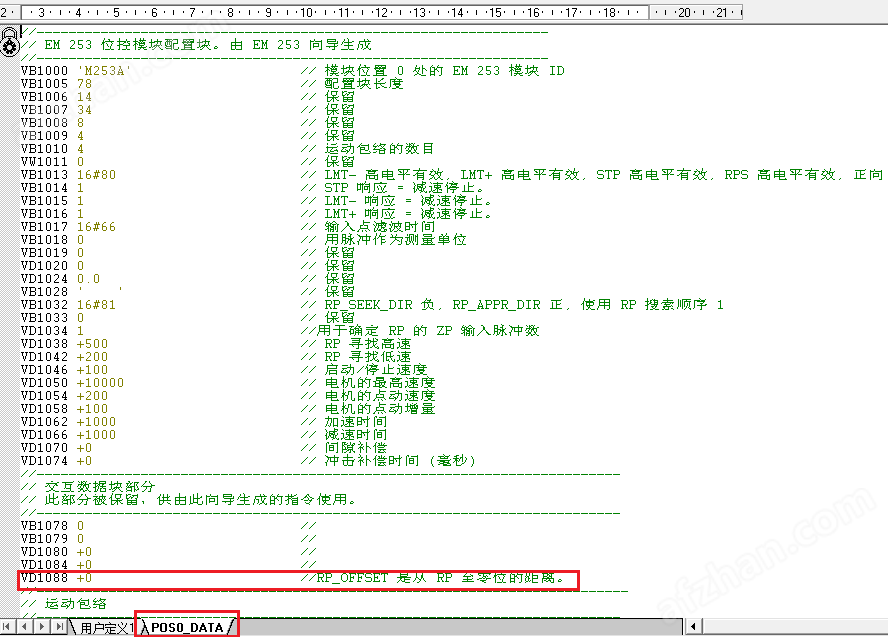
图 6. 参考点偏移量地址
 在 EM253 向导中修改参考点偏移量与执行 POS0_LDOFF 指令修改参考点偏移量有何区别?
在 EM253 向导中修改参考点偏移量与执行 POS0_LDOFF 指令修改参考点偏移量有何区别?
 举例说明在 EM253 向导组态中修改参考点偏移量前后数值变化。
举例说明在 EM253 向导组态中修改参考点偏移量前后数值变化。
在 EM253 向导组态中设置参考点偏移量 0 ,如下图 7 所示:

图 7. 设置参考点偏移量 0
在状态表监视参考点偏移量 0, 执行回零点运动后,当前位置 0,如下图 8 所示:

图 8. 监视参考点偏移量 0
在 EM253 向导组态中设置参考点偏移量 100 ,如下图 9 所示:

图 9. 设置参考点偏移量 100
在状态表监视参考点偏移量 100, 执行回零点运动后,当前位置 100,如下图 10 所示:

图 10. 监视参考点偏移量 100
举例说明执行 POS0_LDOFF 指令修改参考点偏移量前后数值变化。
执行 POS0_LDOFF 指令前,将运动控制对象移动到位置 100。在状态表监视参考点偏移量 0, 当前位置 100,如下图 11 所示:

图 11. 监视参考点偏移量
在当前位置 100 处,执行 POS0_LDOFF 指令。之后,在状态表监视参考点偏移量 -100, 当前位置 0,如下图 12,13 所示:

图 12. 执行 POS0_LDOFF 指令

图 13. 监视参考点偏移量 -100
执行回零点运动后, 当前位置为 -100,如下图 14 所示:

图14. 监视当前位置-100
为什么执行子程序 POSX_LDOFF 报错, 错误代码为 6?
在程序中执行子程序 POSX_LDOFF, 出现错误代码 6,如下图 15 所示:

西门子数控810D 6FC5210-0DF00-1AA3 SINUMERIK 810D/840D 电子控制设备 PCU20:SPC
子程序 POS0_LDOFF 出错
查看 EM253 位控模块指令错误代码信息, 错误代码 6 含义是由于没有定义的参考点而放弃。因此, 执行子程序 POSX_LDOFF 前,必须先执行了 POSX_RSEEK 指令,建立了参考点 。
EM 253 位控模块生成的子程序 POS0_LDOFF 与 POS0_LDPOS 有何区别 ?
子程序 POS0_LDOFF 用于装载参考点偏移量。
执行该子程序时,位控模块计算当前位置与参考点之间的偏移量,将该数值存储到 RP_OFFSET,并将当前位置设为 0。如下图 16 所示:
图 16. 子程序 POS0_LDOFF
POS0_LDPOS 指令用于改变模块的当前位置, 也可用于为运动建立一个新的零位置。
例如,执行子程序 POS0_LDPOS 前,当前位置 VD 300 =+100。如下图 17 所示:

图 17. 执行子程序POS0_LDPOS 前
设置新位置 VD 108=0,执行子程序 POS0_LDPOS 后,当前位置 VD 300 =0。如下图 18 所示:

图 18 . 执行子程序 POS0_LDPOS 后
EM 253 位控模块配置好的加减速时间可以修改吗?
可以。而且可通过以下三种方法进行修改:
方法 1. 程序中调用子程序 POS_SRATE 直接修改。
如执行POS0_SRATE 指令,修改加减速时间为 1500 ms ,如下图 19 所示:

图 19. 子程序 POS0_SRATE
方法 2. 找到数据块中相应的 V存储区地址,然后在程序中赋新值 ,并执行 CFG 指令。
*步:先在 EM253 向导生成的数据块中找到加速时间和减速时间分别对应的地址, 如 VD1062 和 VD1066 ,如下图 20 所示:

SINUMERIK 810D/840D 电子控制设备 PCU20:SPC
您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN








智慧城市网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码












