可编程控制器 上海邑斯公司优势产品; PLC 、触摸屏、变频器、电缆及通讯卡、数控系统、网络接头、伺服驱动、 凡在公司采购西门子产品,均可质保一年,假一罚十 以满足客户的需求为宗旨 , 以诚为本 , 精益求精 概述西门子公司一直致力于工业自动化技术的研发、推广及应用,在过去的 160 多年里,为广大的工业客户带来了可靠高效的自动化产品,完善的自动化解决方案,提高了客户的生产效率,增强了客户的市场竞争力。
西门子 SIMATIC 控制器系列是一个完整的产品组合,包括从zui基本的智能逻辑控制器LOGO!以及 S7 系列高性能可编程控制器,再到基于 PC 的自动化控制系统。无论多么严苛的要求,它都能根据具体应用需求及预算,灵活组合、定制,并一一满足。
SIMATIC S7-200 SMART 是西门子公司经过大量市场调研,为中国客户量身定制的一款高性价比小型 PLC 产品。结合西门子 SINAMICS 驱动产品及 SIMATIC 人机界面产品,以 S7-200 SMART 为核心的小型自动化解决方案将为中国客户创造更多的价值。 SIMATIC S7-200 SMART 产品亮点: - 机型丰富,更多选择
提供不同类型、I/O 点数丰富的CPU 模块,单体I/O 点数zui高可达60 点,可满足大部分小型自动化设备的控制需求。另外,CPU 模块配备标准型和经济型供用户选择,对于不同的应用需求,产品配置更加灵活,zui大限度的控制成本。 - 选件扩展,精确定制
新颖的信号板设计可扩展通信端口、数字量通道、模拟量通道。在不额外占用电控柜空间的前提下,信号板扩展能更加贴合用户的实际配置,提升产品的利用率,同时降低用户的扩展成本。 - 高速芯片,性能
配备西门子高速处理器芯片,基本指令执行时间可达0.15 μs,在同级别小型PLC 中遥遥。一颗强有力的“芯”,能让您在应对繁琐的程序逻辑,复杂的工艺要求时表现的从容不迫。 - 以太互联,经济便捷
CPU 模块本体标配以太网接口,集成了强大的以太网通信功能。一根普通的网线即可将程序下载到PLC 中,方便快捷,省去了编程电缆。通过以太网接口还可与其它CPU 模块、触摸屏、计算机进行通信,轻松组网。 - 三轴脉冲,运动自如
CPU 模块本体zui多集成3 路高速脉冲输出,频率高达100 kHz,支持PWM/PTO输出方式以及多种运动模式,可自由设置运动包络。配以方便易用的向导设置功能,快速实现设备调速、定位等功能。 - 通用SD 卡,方便下载
本机集成Micro SD 卡插槽,使用市面上通用的Micro SD 卡即可实现程序的更新和PLC 固件升级,*地方便了客户工程师对zui终用户的服务支持,也省去了因PLC 固件升级返厂服务的不便。 - 软件友好,编程高效
在继承西门子编程软件强大功能的基础上,融入了更多的人性化设计,如新颖的带状式菜单、全移动式界面窗口、方便的程序注释功能、强大的密码保护等。在体验强大功能的同时,大幅提高开发效率,缩短产品上市时间。 - *整合,无缝集成
SIMATIC S7-200 SMART 可编程控制器,SIMATIC SMART LINE 触摸屏和SINAMICSV20 变频器*整合,为OEM 客户带来高性价比的小型自动化解决方案,满足客户对于人机交互、控制、驱动等功能的*需求。

设计S7-200 SMART 带来两种不同类型的CPU 模块: - 标准型
- 继电器输出型(SR20 / SR40 / SR60)
- 晶体管输出型(ST40 / ST60)
- 经济型
- 继电器输出型(CR40)
标准型作为可扩展CPU 模块,可满足对I/O 规模有较大需求,逻辑控制较为复杂的应用;而经济型CPU 模块直接通过单机本体满足相对简单的控制需求。具有: - 以太网接口
- RS485 串口
- 支持 Micro SD 卡
- 高速计数
- I/O 模块扩展 1)
- 信号板扩展 1)
- 实时时钟 1)
- 高速脉冲输出 2)
1) 仅有标准型 CPU 模块支持 2) 只有标准型、晶体管输出型才支持 型号 | CR40 | SR20 | SR40 | SR60 | ST40 | ST60 |
|---|
高速计数 | 4 路 30 kHz | 4 路 60 kHz | 4 路 60 kHz | 4 路 60 kHz | 4 路 60 kHz | 4 路 60 kHz | 高速脉冲输出 | - | - | - | - | 3 路 100 kHz | 3 路 100 kHz | 通信端口 | 2 | 2 ~ 3 | 2 ~ 3 | 2 ~ 3 | 2 ~ 3 | 2 ~ 3 | zui大开关量 I/O 3) | 40 | 148 | 168 | 188 | 168 | 188 | zui大模拟量 I/O 3) | - | 24 | 24 | 24 | 24 | 24 |
3) 不包括信号板扩展的I/O 信号板 对于少量的 I/O 点数扩展及更多通信端口的需求,全新设计的信号板能够提供更加经济、灵活的解决方案。 信号板基本信息: 型号 | 规格 | 描述 |
|---|
SB DT04 | 2DI/2DO 晶体管输出 | 提供额外的数字量I/O 扩展,支持2 路
数字量输入和2 路数字量晶体管输出 | SB AQ01 | 1AO | 提供额外的模拟量I/O 扩展,支持1 路
模拟量输出,精度为12 位 | SB CM01 | RS232/RS485 | 提供额外的RS232 或RS485 串行通信接
口,在软件中简单设置即可实现转换 |
信号板组态: 在系统块选择标准型CPU模块后,SB选项里会出现上述三种信号板: - 选择SB DT04 时,系统自动分配I7.0 和Q7.0 做为I/O 映像区的起始位
- 选择SB AQ01 时,系统自动分配AQW12 做为I/O 映像区
- 选定SB CM01 时,在端口类型设置框里选择RS232 或RS485 即可
功能网络通信 S7-200 SMART CPU 模块本体集成1 个以太网接口和1 个RS485 接口,通过扩展CM01 信号板,其通信端口数量zui多可增至3 个。可满足小型自动化设备连接触摸屏、变频器等第三方设备的众多需求。 - 以太网通信
所有CPU 模块标配以太网接口,支持西门子S7 协议、TCP/IP 协议、有效支持多种终端连接:- 可作为程序下载端口(使用普通网线即可)
- 与SMART LINE HMI 进行通信
- 通过交换机与多台以太网设备进行通信,实现数据的快速交互
- zui多支持4 个设备通信
- 串口通信
S7-200 SMART CPU 模块均集成1 个RS485 接口,可以与变频器、触摸屏等第三方设备通信。如果需要额外的串口,可通过扩展CM01 信号板来实现,信号板支持RS232/RS485 自由转换,zui多支持4 个设备。串口支持下列协议:
- 与上位机的通信
通过PC Access,操作人员可以轻松通过上位机读取S7-200 SMART 的数据,从而实现设备监控或者进行数据存档管理。
(PC Access 是专门为S7-200 系列PLC 开发的OPC 服务器协议,专门用于小型PLC 与上位机交互的OPC 软件)
运动控制 三轴 100 kHz 高速脉冲输出,*实现精确定位. - 运动控制基本功能
- 标准型晶体管输出CPU 模块,ST40/ST60 提供3 轴100 kHz 高速脉冲输出,支持PWM(脉宽调制)和PTO 脉冲输出
- 在PWM 方式中,输出脉冲的周期是固定的,脉冲的宽度或占空比由程序来调节,可以调节电机速度、阀门开度等
- 在PTO 方式(运动控制)中,输出脉冲可以组态为多种工作模式,包括自动寻找原点,可实现对步进电机或伺服电机的控制,达到调速和定位的目的
- CPU 本体上的Q0.0,Q0.1 和Q0.3 可组态为PWM 输出或高速脉冲输出,均可通过向导设置完成上述功能
- PWM 和运动控制向导设置
为了简化您应用程序中位控功能的使用,STEP 7- Micro/WINSMART 提供的位控向导可以帮助您在几分钟内全部完成PWM、PTO 的组态。该向导可以生成位控指令,您可以用这些指令在您的应用程序中对速度和位置进行动态控制。
PWM 向导设置根据用户选择的PWM 脉冲个数, 生成相应的PWMx_RUN 子程序框架用于编辑。
运动控制向导zui多提供3 轴脉冲输出的设置,脉冲输出速度从20 Hz 到100 kHz 可调。
- 运动控制功能特点
- 提供可组态的测量系统,输入数据时既可以使用工程单位(如英寸或厘米),也可以使用脉冲数
- 提供可组态的反冲补偿
- 支持、相对和手动位控模式
- 支持连续操作
- 提供多达32 组运动动包络,每组包络zui多可设置16 种速度
- 提供4 种不同的参考点寻找模式,每种模式都可对起始的寻找方向和zui终的接近方向进行选择
- 运动控制的监控
为了帮助用户开发运动控制方案,STEP 7- Micro/WIN SMART 提供运动控制面板。其中的操作、组态和包络组态的设置使用户在开发过程的启动和测试阶段就能轻松监控运动控制功能的操作。- 使用运动控制面板可以验证运动控制功能接线是否正确,可以调整组态数据并测试每个移动包络
- 显示位控操作的当前速度、当前位置和当前方向,以及输入和输出LED(脉冲LED 除外)的状态
- 查看修改在CPU 模块中存储的位控操作的组态设置
编程 人性化软件,提升编程效率 STEP 7- Micro/WIN SMART 是专门为S7-200 SMART 开发的编程软件,能在Windows XP SP3/Windows 7 上运行,支持LAD、FBD、STL语言。安装文件小于100 MB。在沿用STEP 7- Micro/WIN 优秀编程理念的同时,更多的人性化设计使编程更容易上手,项目开发更加高效。 - 全新菜单设计
摒弃了传统的下拉式菜单,采用了新颖的带状式菜单设计,所有菜单选项一览无余,形象的图标显示,操作更加方便快捷。
双击菜单即可隐藏,给编程窗口提供更多的可视空间。
- 全移动式窗口设计
软件界面中的所有窗口均可随意移动、并提供八种拖拽放置方式。
主窗口、程序编辑窗口、输出窗口、变量表、状态图等窗口均可按照用户的习惯进行组合,zui大限度的提高编程效率。
- 变量定义与程序注释
用户可根据工艺需求自定义变量名,并且直接通过变量名进行调用,*享受高级编程语言的便利。根据实现的功能,特殊功能寄存器调用后自动命名,更加便捷。
STEP 7- Micro/WIN SMART 提供了完善的注释功能,能为程序块、编程网络、变量添加注释,大幅提高程序的可读性。当鼠标移动到指令块时,自动显示各管脚支持的数据类型。
- 强大的密码保护
STEP 7- Micro/WIN SMART 不仅对计算机中的程序源提供密码保护,同时对CPU 模块中的程序也提供密码保护,满足用户对密码保护的不同需求,*保护用户的知识产权。
STEP 7- Micro/WIN SMART 对程序源实现三重保护:包括为为工程、POU(程序组织单元)、数据页设置密码,只有*的用户才能查看并修改相应的内容。
编程软件对 CPU 模块里的程序提供4 级不同权限密码保护。
- 新颖的设置向导
STEP 7- Micro/WIN SMART 集成了简易快捷的向导设置功能,只需按照向导提示设置每一步的参数即可完成复杂功能的设定。新的向导功能允许用户直接对其中某一步的功能进行设置,修改已设置的向导便无需重新设置每一步。
向导设置支持以下功能:
• HSC(高速计数)
• 运动控制
• PID
• PWM(脉宽调制)
• 文本显示
- 状态监控
在STEP 7- Micro/WIN SMART 状态图中,可监测PLC 每一路输入/ 输出通道的当前值,同时可对每路通道进行强制输入操作来检验程序逻辑的正确性。
状态监测值既能通过数值形式,也能通过比较直观的波形图来显示,二者可相互切换。
另外,对PID 和运动控制操作,STEP 7- Micro/WIN SMART 通过专门的操作面板可对设备运行状态进行监控。
- 便利的指令库
在PLC 编程中,一般将多次反复执行的相同任务编写成一个子程序,将来可以直接调用。使用子程序可以更好地组织程序结构,便于调试和阅读。
STEP 7- Micro/WIN SMART 提供便利的指令库功能,将子程序转化成指令块,与普通指令块一样,直接拖拽到编程界面就能完成调用。指令库功能提供了密码保护功能,防止库文件被随意查看或修改。
另外,西门子公司提供了大量完成各种功能的指令库,均可轻松添加到软件中。
技术规范 电磁兼容性 — 抗扰度符合 EN61000-6-2 |
|---|
EN 61000-4-2
静电放电 | 8 kV,对所有表面的空中放电
6 kV,对暴露导电的表面接触放电 | EN 61000-4-3
辐射,无线电频率,电磁场抗扰度测试 | 80 ~ 1000 MHz,10 V/m,1 kHz 时 80% AM
1.4 ~ 2.0 GHz,3 V/m,1 kHz 时 80% AM
2.0 ~ 2.7 GHz,1 V/m,1 kHz 时 80% AM | EN 61000-4-4
快速瞬变脉冲 | 2 kV,5 kHz,— AC 和 DC 系统电源的耦合网络
2 kV,5 kHz,— I/O 的耦合夹 | EN 61000-4-5
浪涌抗扰度 | AC 系统 — 2 kV 共模,1 kV 差模
DC 系统 — 2 kV 共模,1 kV 差模
对于 DC 系统(I/O 信号、DC 电源系统),需要外部保护 | EN61000-4-6
传导干扰 | 150 kHz ~ 80 MHz,10 V RMS,1 kHz 时 80% AM | EN61000-4-11
电压骤降 | AC 系统
60 Hz 时,0% 持续 1 个周期、40% 持续 12 个周期和 70% 持续 30 个周期 | 电磁兼容性 — 传导和辐射发射符合 EN 61000-6-4 | 传导发射 EN55001、A 类,组 1
0.15 MHz ~ 0.5 MHz
0.5 MHz ~ 5 MHz
5 MHz ~ 30 MHz | < 79 dB(¡V)准峰值;< 66 dB(¡V)平均值
< 73 dB(¡V)准峰值;< 60 dB(¡V)平均值
< 73 dB(¡V)准峰值;< 60 dB(¡V)平均值 | 辐射 EN55001、A 类,组 1
30 MHz ~ 230 MHz
230 MHz ~ 1 GHz | < 40 dB(¡V/m)准峰值;在 10 m 处测得
< 47 dB(¡V/m)准峰值;在 10 m 处测得 | 环境条件 — 运输和存储 | EN60068-2-2,测试 Bb,干热和 EN60068-2-1,测试 Ab,寒冷 | -40°C ~ 70°C | EN60068-2-30,测试 Db,湿热 | 25°C ~ 55°C / 湿度 95% | EN60068-2-14 测试 Na,温度骤变 | -40°C ~ 70°C,停留时间 3 小时,5 个周期 | EN60068-2-32,自由落体 | 0.3 m,5 次,产品包装 | 大气压 | 1080 ~ 660 hPa(相当于海拔 -1000 ~ 3500 m) | 环境条件 — 工作 | 环境温度范围(设备下部 25 mm 进风距离) | 0°C ~ 55°C,水平安装
0°C ~ 45°C,垂直安装
湿度 95%,不结露 | 大气压 | 1080 ~ 795hPa(相当于海拔 -1000 ~ 2000m) | 污染物浓度 | SO2:< 0.5 ppm;H2S:< 0.1ppm;RH < 60%,不结露 | EN 60068-2-14,测试 Nb,温度变化 | 5°C ~ 55°C,3°C/分钟 | EN 60068-2-27 机械冲击 | 15 G,11 ms 脉冲,3 个轴向上 6 次冲击 | EN 60068-2-6 正弦振动 | DIN导轨安装:5 ~ 9 Hz 时 3.5 mm,9 ~ 150 Hz 时 1 G
面板安装:5 ~ 9 Hz 时 7.0 mm,9 ~ 150 Hz 时 2 G
每个轴 10 次摆动,每分 1 倍频程 | 高电位绝缘测试 | 24 V/5 V 标称电路间 | 520 V DC(光隔离边界的型式测试) | 115/230 V 电路对地 | 1500 V AC 常规测试/1950 V DC 型式测试 | 115/230 V 电路对 115/230 V 电路 | 1500 V AC 常规测试/1950 V DC 型式测试 | 115/230 V 电路对 24 V/5 V 电 | 1500 V AC 常规测试/3250 V DC 型式测试 | 以太网端口对 24 V/5 V 电路和接 | 1500 V AC(*型式测试) |
:陈明银 同步 : : : SINAMICS V90固件版本1.05以上开始,伺服驱动器提供了Modbus RTU 通信功能。PLC可以通过Modbus 的FC3及FC6功能代码读取或写入伺服驱动的寄存器,S7-200 Smart可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。本文详细描述了S-200 SMART PLC 通过Modbus RTU通信连接SINAMICS V90实现内部位置的MDI功能。 2 *条件2.1 使用的硬件使用的硬件如表2-1所示。 序号 | 设备名称 | 订货号 | 1 | SIMATIC S7-200 SMART CPU ST60 | 6ES7288-1ST60-0AA0 | 2 | V90驱动器 | 6SL3210-5FE10-4UA0(V1.05版本以上) | 3 | 伺服电机 | 1FL6042-1AF61-0LG1 | 4 | 电机及编码器配套电缆 | |
表2-1使用的硬件2.2 使用的软件使用的软件如表2-2所示。 序号 | 描 述 | 1 | Window 7 旗舰版 32位或64位 | 2 | STEP 7-Micro/WIN SMART 编程软件 | 3 | SINAMICS V-ASSISTANT V1.02 |
表2-2使用的软件2.3 通信连接SINAMICS V90 伺服驱动通过 RS485 电缆与 PLC 连接,使用标准 Modbus 通信协议进行通讯。通过Modbus PLC给V90发送伺服使能和停止命令并且可以读取伺服驱动器的状态及故障代码。 SINAMICS V90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLC RS485(端口 0) 进行通讯,接线如图2-1所示。 
图2-1 S7-200 SMART CPU 与V90通讯线连接 3 通过Modbus通信实现V90内部位置控制的MDI功能3.1 V90 Modbus 寄存器说明V90内部控制的控制数据寄存器如表3-1所示。 寄存器编号 | 描述 | 单位 | 定标系数 | 范围 | 40100 | IPOS控制模式控制字 | | | | 40932/40933 | MDI 速度设定值 | 1000LU/min | 1 | 1至2147482647 | 40934 | MDI 加速度倍率 | % | 100 | 0.1 至100 | 40935 | MDI 减速度倍率 | % | 100 | 0.1 至100 | 40102 | 位置设定值高字 | LU | 1 | -2147482648至 2147482647 | 40103 | 位置设定值低字 |
表3-1 V90的内部位置控制数据寄存器 IPOS控制模式寄存器 40100控制字的定义如表3-2所示。 位 | 信号 | 描 述 | 0 | SON_OFF1 | 通过上升沿使能伺服,=0时驱动通过斜坡函数发生器停车,脉冲被取消 | 1 | OFF2 | 1:OFF2=1,允许使能 0:OFF2=0,立即取消脉冲 | 2 | OFF3 | 1:OFF3=1,允许使能 0:OFF3=0,快速停车,脉冲被消除 | 3 | OPER | 1:允许运行(脉冲可以被使能) 0:禁止运行(取消脉冲) | 4 | SETP_ACC | 触发上升沿来接收MDI 设定值 | 5 | TRANS_TYPE SE | 1:立即接收新的设定值 0:通过触发上升沿来接收新的设定值 | 6 | POS_TYP | 1:定位 0:相对定位 | 7 | RESET | 复位故障 | 8 | 预留 | | 9 | 预留 | | 10 | PLC | 使能 PLC 的控制权 | 11 | 预留 | | 12 | 预留 | | 13 | SREF | 启动回参考点(对于p29240=0,通过REF 信号回参考点) | 14 | 预留 | | 15 | 预留 | |
表3-2 寄存器 40100控制字的定义 3.2 V90参数设置按照表3-3设置伺服驱动器的相关参数 参数设置 | 说明 | P29003=1 | P29003为内部控制模式 | P29303[0]=3 | 设置DI3为CWL,正限位,连接限位开关为高电平 | P29304[0]=4 | 设置DI4为CCWL,负限位,连接限位开关为高电平 | P29004=1 | 设置SINAMICS V90 的MODBUS站地址为1 | P29007=2 | 设置通信协议为Modbus 协议 | P29008=1 | 选择 Modbus 控制源,设定值和控制字来自于 Modbus PZD | P29009=8 | 设置传输波特率为38400 波特 |
表3-3伺服驱动器的相关参数 3.3 PLC的编程PLC的编程如表3-4所示。 序号 | | 1 | 初始化Modbus通信接口,需确保 PLC 的波特率与驱动设置*,设置 PLC 校验方式为偶校验(parity = 2)。 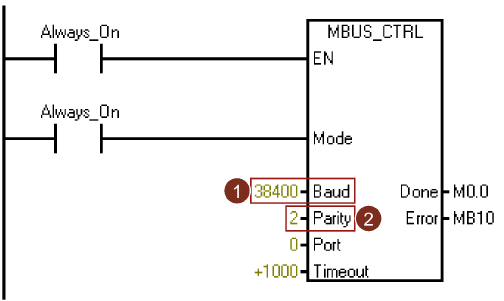
| 2 | 通过寄存器 40100 写入需要的控制字。必须设置寄存器 40100 的位 10 为 1 以允许 PLC 控制驱动。使能驱动器,先将16进制数 40E 写入寄存器 40100 中,然后再写入 40F)。 
| 3 | 如果需要对带增量编码器驱动执行回参考点操作,保持驱动为伺服使能状态,可通过写控制字 40100 第13位,执行回参考点操作。 | 4 | 通过MBUS_MSG功能块,将位置设定值和速度设定值写入寄存器40932、40933、40934、40935、40102 和40103 中。 
| 5 | MDI相对定位的40100控制寄存器操作: (1) 在IPos 控制模式中,控制字的位6=0选择相对定位模式(40F) (2) 控制字的位5=0,设置使用上升沿来接收MDI 设定值(40F) (3) 将表3-1中的寄存器,写入需要的值 (如40934及40935写入十六进制的4000, 40932/40933写入MDI速度值,40102/40103写入MDI的位置值) 后,通过PLC发送控制字的位4上升沿来接收设定值,驱动进行MDI运行(41F) | | MDI定位的40100控制寄存器操作: (1) 在IPos 控制模式中,控制字的位6=1来选择定位模式(44F) (2) MDI设定值的生效有两种: MDI设定值立即生效:控制字的位5=1,设置接收的MDI设定值立即生效(46F); 上升沿来接收MDI 设定值:控制字的位5=0,设置使用上升沿来接收MDI 设定值(44F) (3) 将表3-1中的寄存器写入需要的值 (如40934及40935写入十六进制的4000,40932/40933写入MDI速度值,40102/40103写入MDI的位置值)后,如果是MDI设定值立即生效,则驱动进行MDI运行。如果是通过上升沿接收MDI设定值,则通过PLC发送控制字的位4的上升沿来接收设定值(45F),驱动进行MDI运行 |
表3-4 PLC的编程 与RS485接口的西门子触摸屏的通信SMART面板概述SMART面板分为*代产品SMART LINE和第二代产品SMART LINE IE,*代产品无以太网口,包括Smart 700和Smart 1000;第二代产品集成了以太网口,包括Smart 700 IE和Smart 1000 IE,目前在售的为第二代SMART LINE IE系列,*代产品已经停产。 SmartLine IE与*代SmartLine相比较主要有以下优点: - 64K真彩显示,比较*代的256色提升了多倍。
- 增加了工业以太网接口(支持自交叉功能)。通过该以太网口可以连接S7-200 SMART和LOGO! 0BA7设备,并且可同时连接多台控制器(zui多3台)。
- 扩展了串口通信的功能。
连接数目S7-200 SMART CPU既可以通过本体集成的RS485端口或信号板连接支持PPI协议的西门子HMI设备,还可以通过本体集成的以太网口来连接支持S7协议的西门子HMI设备。 当CPU的三个物理接口同时连接西门子HMI设备时(包含信号板),zui多的连接资源数是16个。 表1. CPU的连接能力 | 通信口 | 连接TD400C个数 | 连接RS485接口的西门子触摸屏个数 | 连接以太网接口的西门子触摸屏个数 | | 本体集成RS485接口 | 4 | 4 | 0 | | 信号板RS232/RS485接口 | 4 | 4 | 0 | | 以太网口 | 0 | 0 | 8 |
创建项目用户需要使用WinCC Flexible 2008 SP2 China或以上版本来组态*代产品SmartLine,如果是第二代产品SmartLine IE的话,只能使用WinCC Flexible 2008 SP4 China进行组态。 用户既可以在WinCC Flexible中直接创建项目,也可以使用向导创建。下文主要介绍如何直接创建项目。 双击PC桌面的SIMATIC WinCC flexible图标可以启动WinCC flexible,在启动画面中选择“创建一个空项目”,如图1 所示。鼠标左键单击“创建一个空项目”后,打开如图2所示的“设备选择”界面。在该界面选择所使用的设备,在此以Smart 1000 IE为例。 
图1. 直接创建项目 
图2. 设备选择 配置通信连接用户通过以下步骤可配置Smart 1000 IE与S7-200 SMART CPU的PPI通信。 *步:在WinCC flexible的主工作窗口中,展开左侧树形项目结构,选择“项目”>“通讯”>“连接”,双击“连接”图标以打开“连接设置”的属性窗口。如图3所示。 
图3. 打开连接窗口 第二步:在“连接”窗口中双击名称下方的空白表格,或者右击鼠标选择快捷菜单中的“添加连接”可以添加与CPU的连接。如图4所示。 
图4. 添加连接 第三步:添加连接后,根据项目需求用户可以修改默认的连接名称“连接_x”,并选择“通讯驱动程序”和是否在线。由于连接的设备是S7-200 SMART CPU,所以在“通讯驱动程序”下方的下拉菜单处选择“SIAMTIC S7 200 SMART”作为通讯驱动程序,同时激活在线连接。如图5所示。 
图5. 配置连接 第四步:设置连接参数。首先选择Smart 1000 IE的接口为“IF1 B”,即触摸屏的RS422/485物理接口。选中该接口后,该接口的参数设置窗口将在其下方自动显示。设置触摸屏的通信波特率为187500,站地址为1。 接着在“网络”窗口选择“PPI”为通信双方的通信协议。 zui后在“PLC设备”窗口设置CPU的站地址,此处设置CPU的站地址为2,如图5所示。 
图6. 连接参数设置 注意:CPU的地址必须不同于HMI设备的地址,二者不能重复。 第五步:设置S7-200 SMART CPU的波特率和站地址。在STEP 7 Micro/WIN SMART软件的项目树中选择“系统块”,然后按“回车”键,即可打开如图7所示的“系统块”窗口。为CPU的RS485端口设置的站地址和波特率必须与图6的配置保持*,CPU的站地址为2,通信波特率为187.5 kbps。 
图7. S7-200 SMART通信口设置 至此已经配置完成了Smart 1000 IE与S7-200 SMART CPU的PPI通信。 启动操作画面给Smart 1000 IE设备上电时屏幕会短暂出现启动画面,如图8所示。图中的三个按钮代表的含义如下。 - Transfer:HMI设备设置为“传送”模式。
- Start:启动装载在HMI设备上的项目。
- Control Panel:点击该按钮后进入HMI设备的控制面板,用户在控制面板可以选择传输模式,添加密码等。

图8. 启动画面 下载项目文件要将配置好的项目下载到Smart 1000 IE设备上,首先要保证HMI设备的通信口处于激活状态,可通过HMI设备的“Control Panel”>“Transfer”进行设置,如图9所示。如果选择串口方式下载项目,首先需要勾选“Serial”右侧的“Enable Channel”。 
图9. 通信口使能 其次,要使用Siemens原装的PPI编程电缆下载项目,RS-232/PPI电缆(订货号6ES7 901-3CB30-0xA0)和USB/PPI电缆(订货号6ES7 901-3DB30-0xA0)都可以。当使用的电缆是USB/PPI时,要求其E-STAND版本是05或更高版本。 接着在WinCC flexible 软件的菜单栏选择“项目”>“传送”>“传输”,如图10 所示。单击“传输”即可打开“选择设备进行传送”窗口,如图11所示。在“选择设备进行传送”窗口,用户可以选择传输模式为“串行”或“串口(通过USB-PPI电缆)”,在此选择后者进行传输。 
图10. 打开传输设置 
图11. 传输设置 给Smart 1000 IE设备断电再上电后,HMI设备将会出现启动画面,单击Transfer按钮,使HMI设备处于“传送”模式。 接着在WinCC flexible软件中选择“项目”>“传送”>“传输”,单击图11中的“传送”按钮,待HMI设备中的传送状态显示为“传输完成”时,至此已成功通过串口模式将项目传送到HMI设备。 与以太网接口的西门子触摸屏的通信配置通信连接用户通过以下步骤可创建以太网接口的西门子触摸屏与S7-200 SMART CPU的以太网通信,在此以设备Smart 1000 IE为例。 在WinCC flexible的主工作窗口中添加与CPU的连接与上文中RS485接口的西门子触摸屏类似,在此不再赘述。下面主要介绍连接参数设置及下载项目等。 设置连接参数,首先选择Smart 1000 IE的接口为“以太网”,即触摸屏的以太网接口。选中该接口后,该接口的参数设置窗口将在其下方自动显示。设置触摸屏的IP地址为192.168.2.5,该IP地址必须与Smart 1000 IE设备的IP地址相同。 在“PLC设备”窗口设置CPU的IP地址,此处设置CPU的 IP地址为192.168.2.1,如图1所示。 注意:为Smart 1000 IE设置的IP地址必须不同于CPU的IP地址,二者不能重复。 
图1. 设置通信参数 连接参数设置完成之后还需设置Smart 1000 IE设备的IP地址。在触摸屏的“Transfer Settings”界面单击左下角的“Advanced”按钮,在“Ethernet Settings”对话框中输入Smart 1000 IE的IP地址192.168.2.5及子网掩码。输入完成后单击对话框右上角的“OK”按钮保存设置,如图2所示。 图2. Smart 1000 IE的IP地址 下载项目文件要将配置好的项目下载到Smart 1000 IE设备上,需要保证HMI设备的通信口处于激活状态,可通过HMI设备的“Control Panel”>“Transfer”进行设置。选择以太网方式下载项目时,需要勾选“Ethernet”右侧的“Enable Channel”,如图3所示。 
图3. 通信口使能 在WinCC flexible 软件的菜单栏选择“项目”>“传送”>“传输”,单击“传输”即可打开“选择设备进行传送”窗口,如图4所示。在“选择设备进行传送”窗口,选择传输模式为“以太网”,“计算机名或IP地址”处输入HMI设备的IP地址,参考上文在此设置IP地址为192.168.2.5。 图4. 传输设置 IP地址设置完成后,点击图4中的“传送”按钮,待传送状态显示为“传输完成”时,至此已成功通过以太网模式将项目传送到HMI设备。
:陈明银 同步 : : : | 























