 智慧城市网
智慧城市网










详细介绍
西门子S7-1200CPU1217C中央控制单元
西门子 S7-1200 I/O模块
信号模块和通讯模块具有大量可供选择的信号板,可量身定做控制器系统以满足需求,而不必增加其体积。
西门子 S7-1200 CPU
西门子 S7-1200 系统的CPU 有三种不同型号:CPU 1211C,CPU 1212C 和CPU1214C。
强大的工艺功能
西门子 S7-1200将强大的工艺功能集于一身。由于集成了计数和测量,闭环控制和运动控制的工艺,西门子S7-1200的功能面面俱到,可用于多种自动化任务。
SIEMENS可编程控制器西门子SIMATIC S7-1200 主要规格
CPU1215C CPU1214C CPU1212C CPU1211C SM1221 SM1222 SM1223
SM1231 SM1232 SM1234 CSM1277 CM1241 CM1242 CM1243
SB1223 SB1222 SB1221 SB1231 SB1232 SIM1274
上海晋营自动化科技有限公司
:乔 静
电 话:(同号)
邮 箱:3548508227
:3548508227
数字量输出模块允许将数字信号从控制器输出到过程。
佳适应性:使用可以根据需要混合的信号模块,用户可以使其控制器准确地满足相关任务的要求。这可以避免产生不必要的投资。可以使用带有 8 个、16 个和 32 个输入/输出通道的模块。
灵活性:如果任务后续有所扩展,可以升级控制器。更新用户程序非常简单。
功能:
SM 1222 数字量输出信号模块将 SIMATIC S7-1200 的内部信号电平转换为过程所需的外部信号电平。

西门子S7-1200CPU1217C中央控制单元
标准:
SIMATIC S7-1200 符合 VDE、UL、CSA 和 FM(I 类,类别 2;危险区组别 A、B、C 和 D,T4A)。生产质量管理体系已按照 ISO 9001 进行认证。
通信:
SIMATIC S7-1200 支持各种通信机制:
集成 PROFINET IO 控制器接口。
带PROFIBUS DP 主站接口的通信模块。
带PROFIBUS DP 从站接口的通信模块。
GPRS 模块,用于连接到 GSM/G 网络。
LTE 模块,用于在第四代 LTE(长期演进)网络中进行通信。
通信处理器,可通过以太网接口连接到 eControl Server Basic 控制中心软件,并借助于基于 IP 的网络进行安全通信。
通信处理器,可连接到服务应用的控制中心。
RF120C,可连接到 SIMATIC Ident 系统。
模块 SM1278,用于连接 IO-Link 传感器和执行器。
通过通信模块实现点到点连接。 电 话:(同号)
在SENTRON PAC 电力监测设备的主菜单中,调用“设置”>“RS485 模块”,出现下面的设置画面:
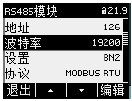
图8: PAC3200 MODBUS RTU 通信参数的设置
1. 地址的设置范围:1-247。本例中设为8。
2. 波特率的设置范围:4800,9600,19200,38400。本例中设为38400。
3. 设置外部通信的数据位、奇偶校验位及停止位:
• 8E1=8 个数据位,奇偶校验位为even, 1 个停止位
• 8O1=8 个数据位,奇偶校验位为odd, 1 个停止位
• 8N2=8 个数据位,无奇偶校验位, 2 个停止位
• 8N1=8 个数据位,无奇偶校验位, 1 个停止位
本例中根据S7-1200 MODBUS MASTER 的参数设置为 8N1。
4. 协议的设置:可选项为:SEABUS,MODBUS RTU。
本例中设为MODBUS RTU。
5.响应时间的设置:注意与波特率的设置相匹配,本例中设为10mS。
6.S71200 与PAC3200的MODBUS RTU通信原理与编程的实现
6. 1 S7 1200 PLC与PAC3200 通过MODBUS RTU 通信的基本原理
S7 1200提供了的MODBUS库进行MODBUS通信,如下图所示:

图9: S7 1200提供的MODBUS库
西门子PLC S7-1200的模块CM1241 RS232和CM1241 RS485都可以实现MODBUS RTU的通信,本例中采用CM1241 RS485模块来实现与仪表PAC3200的MODBUS RTU 的通信。
S7-1200的MODBUS RTU通信的基本原理是:
首先S7-1200 PLC的程序调用一次MODBUS 库中的功能块MB_COMM_LOAD来组态CM1241 RS232和CM1241 RS485模块上的端口,对端口的参数进行配置。
其次调用MODBUS 库中的功能块MB_MASTER或者MB_SLAVE作为MODBUS 主站或者从站与支持MODBUS协议的设备进行通信。
S7-1200 PLC作为MODUBUS 主站 与PAC3200 进行MODBUS RTU 通信的控制原理如下图所示:

图10:S7-1200 PLC作为MODUBUS 主站 与PAC3200 进行MODBUS RTU 通信原理
S7-1200 PLC还可以作为MODBUS子站与作为MODBUS主站之间的PLC进行MODBUS RTU通信,其控制原理如下图所示:

图11:S7-1200 PLC作为MODBUS子站与作为MODBUS主站之间的PLC进行MODBUS RTU的通信原理
每个S7-1200 CPUzui多可带3个通信模块,而每个CM1241 RS485通信模块理论上zui多支持247个MODBUS子站。但是在实际应用时需要考虑CPU的性能以及轮循MODBUS子站的时间。
6. 2 S7 1200 PLC与PAC3200通过MODBUS RTU通信的编程
1.MODBUS RTU 通信接口参数的编程
MB_COMM_LOAD 功能块用于组态点对点 (PtP, Point-to-Point) CM 1241RS485 或 CM 1241 RS232 模块上的端口,以进行 Modbus RTU 协议通信。
程序开始运行时,调用一次MB_COMM_LOAD功能块,来实现对MODBUS RTU模块
的初始化组态。
MB_COMM_LOAD执行一次的编程方式采用如下图所示时钟位M10.0来完成。

图12:MB_COMM_LOAD执行一次的编程时钟位的设置
MB_COMM_LOAD功能块的编程如下图所示。
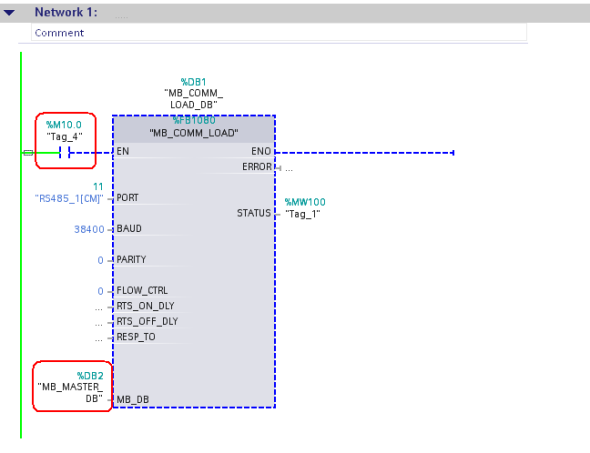
图13:MB_COMM_LOAD功能块的编程
PORT:指的是通过哪个通信模块进行MODBUS RTU通信。
BAUD:指的是和MODBUS子站进行通信的速率。
通信端口的波特率。取值范围为300,600,1200,2400,4800,9600,19200,38400,57600,
76800,115200。
注意:仪表PAC3200的波特率的设置范围:4800,9600,19200,38400。因此上S7-1200
的波特率的设置一定要和仪表PAC3200的波特率的设置相*。
MB_DB:对 MB_MASTER 或 MB_SLAVE 指令所使用的背景数据块的引用。 在用户程序中放置
MB_SLAVE 或 MB_MASTER 后,DB标识符会出现在 MB_DB 功能框连接的助手下拉列表中。
如“MB_MASTER_DB”或“MB_SLAVE_DB”。
STATUS:端口状态代码。具体含义如下表所示。
表4: MB_COMM_LOAD组态端口的状态代码
2.MODBUS_MASTER功能块的编程
MB_MASTER 功能块允许程序作为Modbus 主站使用点对点 (PtP, Point-to-Point) CM 1241 RS485 或 CM 1241RS232 模块上的端口进行通信。 可访问一个或多个 Modbus 从站设备中的数据。
MB_MASTER功能块的编程如下图所示。
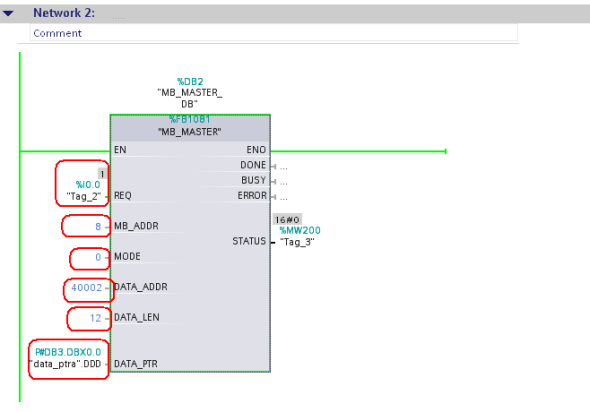
图14:MB_MASTER功能块的编程
REQ:数据发送请求信号。0-无请求。1-请求将数据传送到MODBUS从站。
MB_ADR:通信对象MODBUS从站的地址。有效地址范围为0-247。值 0 被保留用于将消息广播到所有 Modbus 从站。 只有Modbus 功能代码 05、06、15 和 16 是可用于广播的功能代码。
注意:此处MODBUS从站的地址一定要与仪表PAC3200 的MODBUS 地址相*。
MODE:模式选择。选择范围为:读、写、诊断。
DATA_ADDR:从站中的起始地址: 要在 Modbus 从站中访问的数据的起始地址。
工程软件

SIRIUS ES 工程软件 (E-SW)
固态软起动器
SIRIUS 3RW30, 3RW31
SIRIUS 3RW3 固态软起动器适用于软起动和停止三相异步电机。
通过两相控制,在整个起动时间内,所有三相电流都控制在zui小值。当无法避免的电流和转距峰值发生时,如,使用星-三角起动器,可消除连续电压影响。
SIRIUS 3RW30,3RW31 系列设备有 4 种框架规格的 SIRIUS 3R 系统工具箱。它们有以下额定范围:
框架规格 | 用于三相电机 400 V 输出 | 用于单相电机 230 V 输出 |
|---|---|---|
S00 | 1.1- 4 kW | – |
S0 | 5.5 - 11 kW | 4 kW |
S2 | 15 - 22 kW | 5.5 kW |
S3 | 30 - 55 kW | 11 kW |
3RW30,3RW31 固态软起动器有以下三种不同版本:
- 标准版本 3RW30,用于带固定数目极对的电机(速度),
- 特殊版本 3RW31,用于变极电机(仅框架规格 S0),
- 单相电机(zui大 75 A)软起动版本(230 V 时11 kW)。
特征
- 带电压斜坡的软起动; 起动电压可设定在 40 - 100 % 之间,斜坡时间 tR 可在 0 - 20 s 之间设定。
- 带电压斜坡的控制关机; 关机斜坡时间 taus可在 0 - 20 s之间设定。 因此切断电压 Uaus取决于所选择的起动电压 Us 。
- 通过 3 个电位计的设定
- 安装及调试简单
- 主电压 50 / 60 Hz 200 V - 575 V
- 两种控制电压版本 24 V UC 和 110 V - 230 V UC
- 宽广的温度范围 -25 °C - +60 °C
- 内置旁路触头,用于降低功耗
框架规格 S0,S2 和 S3 有 2 个内置辅助触头,确保方便的控制以及装置内进一步处理的可能性。
设定值
装置可进行以下设定:
用于三相电机 | 用于单相电机 | ||
|---|---|---|---|
设定 | 3RW30 | 3RW31 | 3RW30 |
起动时间1,范围 0 - 20 s | 是 | 是 | 是 |
起动时间2,范围 0 - 20 s | 不 | 是 | 不 |
停止时间,范围 0 - 20 s | 是 | 不 | 不 |
起动电压,范围大约为 40 - 100 % | 是 | 是 | 是 |
3RW 固态电机控制器设计用于简单的起动条件。条件不同或操作频率升高时,就要使用较大的设备。若想精确地确定规格,必需将特殊起动条件考虑在内。
请留意技术规范中所的zui大切换频率。
对于 3RW3 SIRIUS 软起动器和电机之间的电机馈电装置,无需安装电容元件(如补偿系统)。
所有用于正向起动和局部短路条件的主电路元件(如保护元件,开关设备和过载继电器)须根据适用系统变量选择,并单独定货。
附件
- 用于3RW302...,3RW303... 和 3RW304...的风扇. 风扇可简单安装在外壳的底排上。设计用于提高开关频率并可安装在非标准位置上。
- 用于 3RW303... 和 3RW304...盒式端子的护罩
- 用于 3RW304...电缆接线片和母线连接的连接护罩
- 连接模块
- AS 接口负荷馈电装置模块
- DIN 导轨适配器
- 用于长控制电压电缆长度的过压限制器
应用
SIRIUS 3RW30/31 固态软启动器适用于三相异步机器的软启动和止动。
由于两相控制,在整个启动时间内,电流在各个相位始终保持在zui小值。 由于连续电压影响,在星形-三角形启动器条件下无可避免的现象,如电流和转矩峰值,在这种情况下不会发生。
应用领域
- 风扇
- 泵
- 成型/施工机械
- 压力机
- 自动扶梯
- 运输系统
- 空调系统
- 通风机
- 装配线
- 压缩机和冷却机
- 操作机构
配置
3RW 固态电机控制器设计用于简便启动条件中。 JLoad < 10 x JMotor. 在异常条件或增大开关频率的情况下,可能有必要选择一个较大的设备。 要获得精确的尺寸,使用 Win-Soft Starter 选型和模拟程序。
如果起动时间较长,必要时必须选用用于较重起动负载的过载继电器。 推荐使用 PTC 传感器 这同样适用于平稳斜降,因为在斜降时间内,可以适用一个附件电流负荷,和自由斜降做对比。
不允许在电机馈电线内 SIRIUS 3RW 软启动器和电机之间使用电容性元件(如,不能使用无功补偿设备)。 此外,无论是用于无功补偿的静态系统,还是动态 PFC(功率因数校正),在启动时和软启动器斜降时都不能并行操作。 这对于防止补偿设备和/或软启动器发生故障来说十分重要。
主电路的所有元件(比如熔断器,开关设备和过载继电器)应该按照在加载短路时直接起动的情况下相应的进行选型。 熔断器,开关设备和过载继电器必须单独订购。 请遵守在技术数据中的zui大开关频率。


 智慧城市网
智慧城市网